
Hardware introduction of industrial robot control system
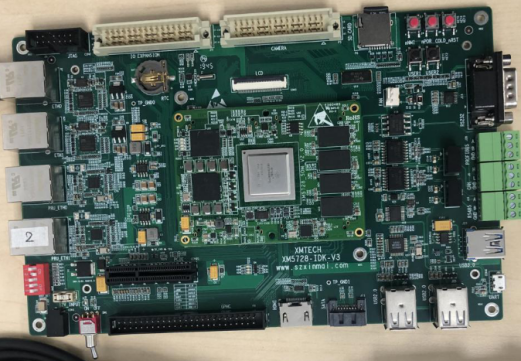
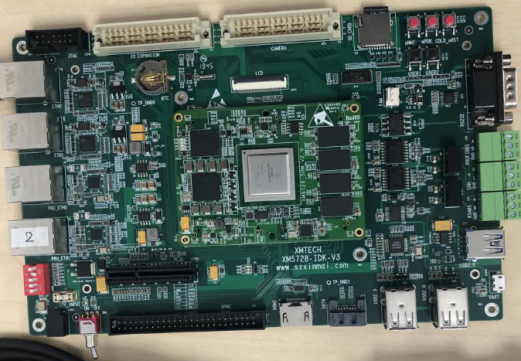
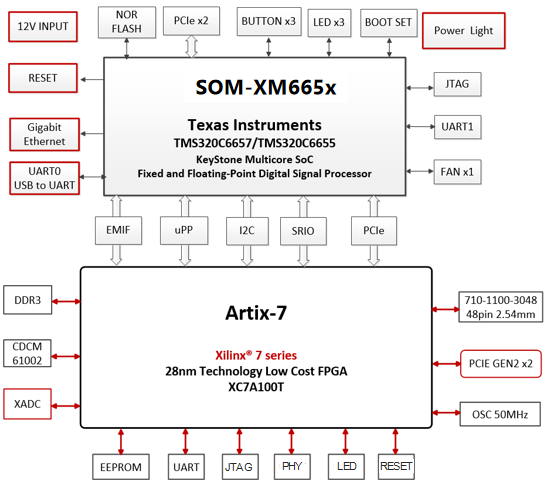
A floating-point DSP of tms320c665x C2000 series, with main frequency of 1.0g/1.25ghz, single core operation capacity of 40g Macs and 20g flops, 101K FPGA xc7a100t logic units and 240 DSP slice;
Tms320c665x is connected with FPGA through communication interfaces such as UPP, EMIF, I2C, PCIe and sRIO. The transmission speed of PCIe and sRIO can reach up to 5 gbaud per channel;
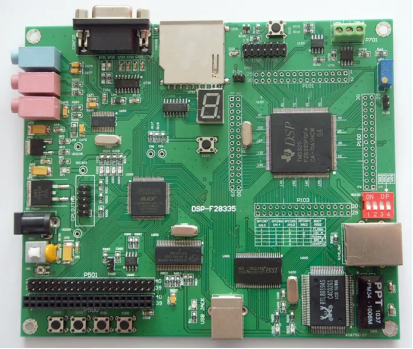
Dual channel 250msps*12bit high-speed and high-precision ADC, one channel 175msps*12bit DAC, acquisition requirements;
Support gigabit network interface and I2C, SPI, UART and McBSP interfaces; Support Cameralink I / O, VGA output and other expansion modules;
The front end uses xc7a100t to collect two channels of ad data, and the ad data is transmitted to DSP through UPP, EMIF bus, PCIe, sRIO interface and other communication interfaces. Update rate 175msps.
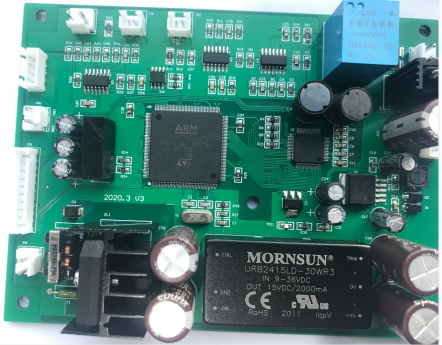
The communication mode between the upper computer and the motion control part adopts RS232 communication.
The PC accesses the wireless LAN built by the zedboard development board and wireless route through WiFi to obtain the video information collected by the zedboard development board.

Software motion control technology, high-precision real-time control kernel, open system architecture, robot control and visual terminal are integrated.
Model: horizontal four axis robot
Arm length: 700mm
Load: rated load: 3kg, maximum load: 6kg
Repeated positioning accuracy: ± 0.02mm
Usage: used for handling, assembling, loading and unloading, testing, sorting, etc. in the horizontal plane